16

Noticias:
SMF - Just Installed!
 Mostrar Mensajes
Mostrar Mensajes
Esta secci�n te permite ver todos los posts escritos por este usuario. Ten en cuenta que s�lo puedes ver los posts escritos en zonas a las que tienes acceso en este momento.
17
Analisis de Equipos comerciales / Icom IC-7610 Technical report v3
« en: Enero 24, 2019, 10:08:23 pm »
Hola,
Icom acaba de publicar el Technical report v3 del IC-7610.
Se puede descargar el PDF aquí: https://www.icomuk.co.uk/files/icom/PDF/newsFile/IC-7610_Technical_Report_Vol3_Eng.pdf
73, Máximo - EA1DDO
[ You are not allowed to view attachments ]
Icom acaba de publicar el Technical report v3 del IC-7610.
Se puede descargar el PDF aquí: https://www.icomuk.co.uk/files/icom/PDF/newsFile/IC-7610_Technical_Report_Vol3_Eng.pdf
73, Máximo - EA1DDO
[ You are not allowed to view attachments ]
18
Analisis de Equipos comerciales / Re:Yaesu FT Dx-101D - Primer Yaesu SDR
« en: Enero 17, 2019, 07:17:45 pm »
Ya van saliendo más detalles del FT Dx-101D
[ You are not allowed to view attachments ]
Según Yaesu el rendimiento es la leche ("padre" como dirían mis amigos los mexicanos), pero yo no tengo del todo claro que insertando ese mezclador delante del conversor A/D sea conveniente.
Habrá que esperar y ver.
73, Máximo - EA1DDO
[ You are not allowed to view attachments ]
Según Yaesu el rendimiento es la leche ("padre" como dirían mis amigos los mexicanos), pero yo no tengo del todo claro que insertando ese mezclador delante del conversor A/D sea conveniente.
Habrá que esperar y ver.
73, Máximo - EA1DDO
19
Todo lo demás / Steve G3TXQ D.E.P.
« en: Enero 01, 2019, 07:07:22 pm »
Hola,
Lamento comentar que Steve G3TXQ nos ha dejado para siempre.
Tenía un cáncer desde hace un par de años que finalmente se lo ha llevado.
Nos quedarán los recuerdos y siempre será recordado por sus magníficos trabajos, sobre todo con los choques.
[ You are not allowed to view attachments ]
D.E.P. Steve G3TXQ
Máximo - EA1DDO
Lamento comentar que Steve G3TXQ nos ha dejado para siempre.
Tenía un cáncer desde hace un par de años que finalmente se lo ha llevado.
Nos quedarán los recuerdos y siempre será recordado por sus magníficos trabajos, sobre todo con los choques.
[ You are not allowed to view attachments ]
D.E.P. Steve G3TXQ
Máximo - EA1DDO
20
Todo sobre Antenas / Nueva tienda de Hartmut DG7YBN - Blade dipolo
« en: Diciembre 04, 2018, 11:13:31 am »
Hola,
Anunciar que el amigo Hartmut DG7YBN se ha lanzado y ha creado una tienda en línea donde comprar algunas piezas difíciles de encontrar para construir Yagi.
Una de esas piezas son sus famosos excitados Blade.
http://www.7arrays.com/

También vende soportes para los elementos, previos de Rx, cinta aislante liquida Spinner, y más cosas.
Incluso ofrece el servicio de cálculo y/o optimización de antenas a usuarios individuales.

73. Máximo - EA1DDO
Anunciar que el amigo Hartmut DG7YBN se ha lanzado y ha creado una tienda en línea donde comprar algunas piezas difíciles de encontrar para construir Yagi.
Una de esas piezas son sus famosos excitados Blade.
http://www.7arrays.com/
También vende soportes para los elementos, previos de Rx, cinta aislante liquida Spinner, y más cosas.
Incluso ofrece el servicio de cálculo y/o optimización de antenas a usuarios individuales.
73. Máximo - EA1DDO
21
Analisis de Equipos comerciales / Icom IC-9700 VHF/UHF/23CM All-Mode SDR Transceiver
« en: Noviembre 11, 2018, 11:28:08 am »
Hola,
Icom ha anunciado el nuevo IC-9700 para principios del año que viene, sobre Febrero 2019.
Parece que va a tener un precio atractivo, sobre los €1800 ... veremos.
El aparato parece que usa la caja del IC-7300.
Por la parte de atrás se pueden ver salidas independientes para 144, 432 y 1200 MHz, todas de serie.
También hay una toma de Ethernet, pero no se exactamente que funciones ofrecerá.


• All mode, tri-band transceiver covering 144 MHz, 430 MHz as well as 1.2GHz
• Supports CW/AM/SSB/FM/RTTY and D-STAR Digital Voice and Digital Data modes
• 144MHz and 430MHz band is direct sampling. The 1.2GHz uses down conversions as well.
• Full duplex operation/ Dual Watch (no VHF/VHF or UHF/UHF capability.)
• PA will provide a powerful 100 W (144 MHz), 75 W (430 MHz) and 10 W (1200 MHz) output
• 4.3" touchscreen colour TFT LCD
• Smooth satellite operation with normal/reverse tracking and 99 satellite channels
• D-STAR provides clear digital audio
• Voice recording/playback function (SD memory card)
• Audio scope
• CW full break-in
73, Máximo - EA1DDO
Icom ha anunciado el nuevo IC-9700 para principios del año que viene, sobre Febrero 2019.
Parece que va a tener un precio atractivo, sobre los €1800 ... veremos.
El aparato parece que usa la caja del IC-7300.
Por la parte de atrás se pueden ver salidas independientes para 144, 432 y 1200 MHz, todas de serie.
También hay una toma de Ethernet, pero no se exactamente que funciones ofrecerá.
• All mode, tri-band transceiver covering 144 MHz, 430 MHz as well as 1.2GHz
• Supports CW/AM/SSB/FM/RTTY and D-STAR Digital Voice and Digital Data modes
• 144MHz and 430MHz band is direct sampling. The 1.2GHz uses down conversions as well.
• Full duplex operation/ Dual Watch (no VHF/VHF or UHF/UHF capability.)
• PA will provide a powerful 100 W (144 MHz), 75 W (430 MHz) and 10 W (1200 MHz) output
• 4.3" touchscreen colour TFT LCD
• Smooth satellite operation with normal/reverse tracking and 99 satellite channels
• D-STAR provides clear digital audio
• Voice recording/playback function (SD memory card)
• Audio scope
• CW full break-in
73, Máximo - EA1DDO
22
Todo sobre Antenas / Re:Antenas Cúbicas - Cubical Quad
« en: Octubre 31, 2018, 11:46:18 am »
Hola,
Poco a poco he podido hacer mi primera aplicación para Android.
Como no podía ser de otra manera, es sobre antenas cúbicas, concretamente una calculadora.
Aún está en versión beta, esto, en pruebas:
https://play.google.com/store/apps/details?id=es.ea1ddo.antenacubica
Funciona bien, aunque algunos me han comentado que no funciona si tienes Android 8 o superior.
Lo miraré estos días.
Es la misma calculadora que hay en mi página web, para 3, 4 y 6 elementos, pero pensé que sería buena idea hacer una aplicación para Android.
Poco a poco la iré mejorando.
73, Máximo - EA1DDO

Poco a poco he podido hacer mi primera aplicación para Android.
Como no podía ser de otra manera, es sobre antenas cúbicas, concretamente una calculadora.
Aún está en versión beta, esto, en pruebas:
https://play.google.com/store/apps/details?id=es.ea1ddo.antenacubica
Funciona bien, aunque algunos me han comentado que no funciona si tienes Android 8 o superior.
Lo miraré estos días.
Es la misma calculadora que hay en mi página web, para 3, 4 y 6 elementos, pero pensé que sería buena idea hacer una aplicación para Android.
Poco a poco la iré mejorando.
73, Máximo - EA1DDO
23
Analisis de Equipos comerciales / Re:Yaesu FT Dx-101D - Primer Yaesu SDR
« en: Octubre 15, 2018, 11:54:13 am »
[ You are not allowed to view attachments ]
24
Todo lo demás / Wimo ha comprado EAntenna
« en: Agosto 29, 2018, 11:38:32 am »
Hola,
Pues parece que Wimo no para.
Recientemente Wimo ya había comprado Ultra-Beam, como comenté en este mismo foro, pues ahora también han comprado EAntenna.
Al igual que con Ultra-Beam, se van a llevar la fabrica a Alemania, y desde allí seguirán haciéndolas, de hecho, Rod EA7JX se va para allá con su familia.
Como resultado de eso, HamRadio.es creo que se va a traspasar.
73, Máximo - EA1DDO
Pues parece que Wimo no para.
Recientemente Wimo ya había comprado Ultra-Beam, como comenté en este mismo foro, pues ahora también han comprado EAntenna.
Al igual que con Ultra-Beam, se van a llevar la fabrica a Alemania, y desde allí seguirán haciéndolas, de hecho, Rod EA7JX se va para allá con su familia.
Como resultado de eso, HamRadio.es creo que se va a traspasar.
Citar
WiMo acquires EAntenna
Herxheim, August 24., 2018
Germany’s largest provider of amateur radio products announces the acquisition of the spanish antenna manufacturer EAntenna.
EAntenna
WiMo Antennen und Elektronik GmbH (Herxheim) will take over sales, service, manufacturing and the trademark of the Spanish manufacturer of short-wave antennas, ‘EAntenna’ from Brenes (Spain). EAntenna has been manufacturing a broad range of HF and VHF / UHF antennas, masts and accessories since 2010. The antennas are used internationally by radio amateurs and commercial radio services for worldwide voice and data communications, and are offered by 20 distributors worldwide.
Volkmar Junge, Managing Director of WiMo: “WiMo has been the largest distributor of EAntenna for a very long time now. Our sales and service teams know the entire EAntenna product portfolio. As we already have our own production lines for a wide range of antennas, we see great leverage in the consolidation of the Spanish production into our manufacturing in Herxheim. This will enable us to provide our customers with the premium support they are used to getting from WiMo’s own product range.”
The former owner of EAntenna, Rodrigo Herrera, EA7JX, will move to Herxheim with his family. Both he and his wife Angeles, who also has extensive knowledge of the EAntenna product portfolio, will continue to work for WiMo after the takeover. Rodrigo Herrera: “We now have the chance to develop the EAntenna product portfolio and take it to a totally new level with a very strong partner. We are very happy and excited to be able to work for WiMo in Germany.”
Volkmar Junge: “The fact that key personnel of EAntenna will continue to work for us is going to ensure that there will be a smooth transition of the production and customer orders can continue to be delivered on-time. At this point, we have enough EAntenna products on stock and lead-times should be below three weeks. In addition we can now offer Spanish, Portuguese and Italian support for our entire product portfolio and we expect to improve our presence in these countries.”
Production will move from Spain to Herxheim in September 2018.
WiMo Antennen und Elektronik GmbH is Germany’s largest provider of amateur radio equipment, antennas and accessories. With more than 40 employees, the company location in Herxheim (Rhineland-Palatinate, district Südliche Weinstraße) is home to a production facility for antennas, cables and accessories. In addition, WiMo offers amateur radio gear from most well-known manufacturers plus a wide range of accessories with more than 4500 products.
EAntenna is an owner-managed company in Brenes (Andalucia, Spain). With 6 employees, Rodrigo Herrara has been building up a renowned brand for antennas for almost 10 years.
73, Máximo - EA1DDO
25
Todo sobre Antenas / WIMO ha comprado Ultra-Beam
« en: Agosto 08, 2018, 12:46:46 pm »
Hola,
Ayer he visto que WIMO ha comprado el fabricante italiano de antenas dinámicas Ultra-Beam.
Según dicen en su página, han comprado la marca y los detalles de fabricación para llevarse a Alemania la fabricación, distribución y venta de las antenas.
En Italia queda una distribución independiente solamente para los clientes italianos; www.antennahub.it
[ You are not allowed to view attachments ]
73, Máximo
Ayer he visto que WIMO ha comprado el fabricante italiano de antenas dinámicas Ultra-Beam.
Según dicen en su página, han comprado la marca y los detalles de fabricación para llevarse a Alemania la fabricación, distribución y venta de las antenas.
En Italia queda una distribución independiente solamente para los clientes italianos; www.antennahub.it
[ You are not allowed to view attachments ]
73, Máximo
26
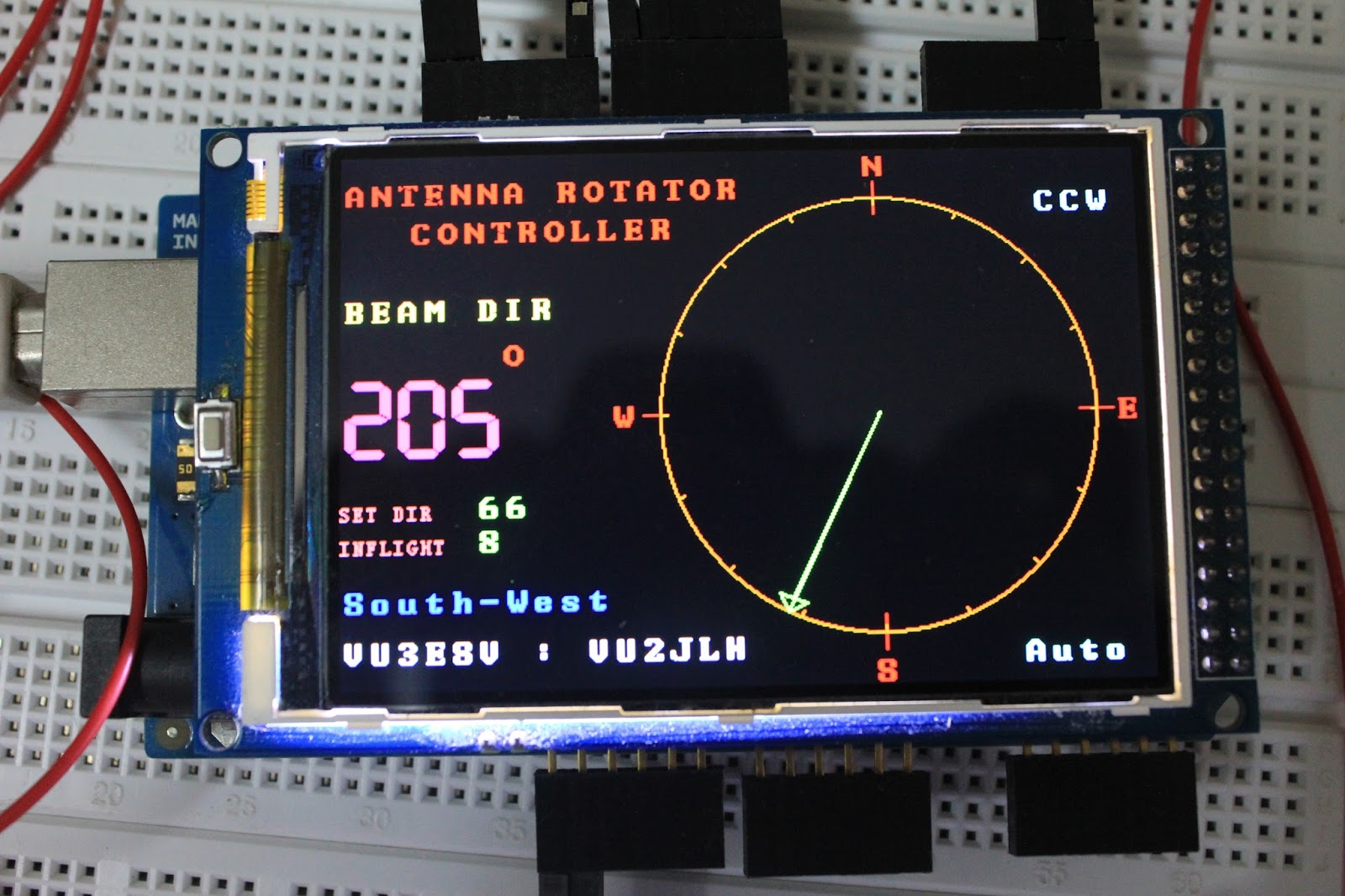
Electrónica, equipos, técnica, etc. / Otro Arduino para control de rotores
« en: Julio 18, 2018, 10:15:57 pm »
Hola,
He visto otro interesante proyecto con Arduino para rotores y lo pongo aquí por si le sirve a alguien:
http://100nf.blogspot.com/2016/06/arduino-mega2560-based-antenna-rotator.html


73, Máximo - EA1DDO
He visto otro interesante proyecto con Arduino para rotores y lo pongo aquí por si le sirve a alguien:
http://100nf.blogspot.com/2016/06/arduino-mega2560-based-antenna-rotator.html
Código: [Seleccionar]
/*
* An Arduino code of Antenna Rotator Controller.
* Copyright (c) 2016 Vinod E S (VU3ESV) , Jayaprakash L V (VU2JLH)
* Version 1.0 - initial release
* Version 1.1 - Inflight Entry after holding the "*" Key for 3 seconds
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
* THE SOFTWARE.
Harware Information :-
1) Arduino Mega 2560R3 or its clones
2) HMC5883 Accelerometer
3) I2C Expander (NXP)
4) 2.8Inch TFT Display
5) Momentary push button switchs
6) Potentiometer
7) H-Bridge for driving the Motors
*/
#include <Wire.h> //I2C Arduino Library
#include <UTFT.h> // UTFT Library from Henning Karlsen (http://www.rinkydinkelectronics.com/library.php)
#include <UTFT_Geometry.h> //UTFT Geometry Library from Henning Karlsen (http://www.rinkydinkelectronics.com/library.php)
#include <Keypad.h>
#include <EEPROM.h>
const int centreX = 320;
const int centreY = 160;
const int diameter = 130;
const int x_Offset = 30;
const int y_Offset = 128;
const int z_Offset = 0;
const byte rows = 4; // Four rows
const byte cols = 3; // Three columns
const int maxDegreeDigits = 3; //maximum allowed input length
const int fixedInflight = 5;
const long maxInflight = 25;
extern uint8_t BigFont[];
extern uint8_t SmallFont[];
extern uint8_t SevenSegmentFull[];
#define BLACK 0x0000
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define ORANGE 0xFF00
#define address 0x1E //0011110b, I2C 7bit address of HMC5883
#define EEPROM_ModeStatus_Location 10 // The starting address of the EEPROM where the data is Stored (10.11.12.13)
#define EEPROMSetpointLocation 14
#define EEPROM_ScaleMax_Location 18
#define EEPROMInflightLocation 22
struct EEPROMValue //EEPROM Data Structure : Taken from G0MGX DDS VFO Code
{
union{
long Value;
struct
{
unsigned char Byte1;
unsigned char Byte2;
unsigned char Byte3;
unsigned char Byte4;
}
__attribute__((packed));
}
__attribute__((packed));
}
__attribute__((packed));
inline long ReadEEPROMValue(int16_t EEPROMStartAddress); //Reads the values from EEPROM Like Calibration , set Parameters, etc
inline void SaveEEPROMValue(int16_t EEPROMStartAddress, long Value); //Save the Value to EEPROM startingfrom the given StartAddress (4 Bytes of Data)
inline double ReadAngleFromAccelerometer(int x_Offset, int y_Offset);
inline void ResetInputBuffer(void);
// Define the Keymap
char keys[rows][cols] =
{
{
'1','2','3' }
,
{
'4','5','6' }
,
{
'7','8','9' }
,
{
'*','0','#' }
};
boolean UserEntryStarted = false;
boolean UserEntryFinished = true;
boolean InflightEntryStarted = false;
boolean InflightEntryFinished = true;
boolean stopFlag = true;
boolean modeValue = false; // modeValue = false (Manual Mode), modeValue = true (Auto Mode)
boolean inputSelection = false; // false = SetPoint Input , True = inflight input
char KeyEntries[3]; //3 characters to store 0 to 360 Degrees
char dataBuffer[60];
char formattedDataBuffer[3];
int dx;
int dy;
int last_dx;
int last_dy;
int bufPtr = 0;
int CWMotor = 10;
int CCWMotor = 11;
int Stop_ResumeSignal = 12;
int Manual_Auto_Mode = 13;
int ManualSpeedControl = 9;
long UserEntry = 0;
long DegreeInput = 0;
long Inflight = 0;
long storedModeValue = 0;
long scaleMax = 0;
double angle = 0;
//Normal Keyboard Connected To Arduino
// Connect keypad ROW0, ROW1, ROW2 and ROW3 to these Arduino pins.
byte rowPins[rows] = {
8, 7, 6, 5 };
// Connect keypad COL0, COL1 and COL2 to these Arduino pins.
byte colPins[cols] = {
4, 3, 2 };
Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, rows, cols );
UTFT utftDisplay(ILI9481,38,39,40,41);
#define FormatData(x) strcpy_P(dataBuffer, PSTR(x))
void setup(){
Serial.begin(9600);
utftDisplay.InitLCD();
utftDisplay.InitLCD(LANDSCAPE);
utftDisplay.clrScr();
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 0);
utftDisplay.print("ANTENNA ROTATOR ", LEFT, 16);
utftDisplay.print("CONTROLLER ", 40, 40);
utftDisplay.drawLine(440, 160, 460, 160);
utftDisplay.drawLine(180, 160, 200, 160);
utftDisplay.drawLine(320, 20, 320, 40);
utftDisplay.drawLine(320, 280, 320, 300);
utftDisplay.setColor(255, 255, 0);
utftDisplay.print("BEAM DIR", LEFT, 87);
utftDisplay.setFont(SmallFont);
utftDisplay.setColor(255, 100, 100);
utftDisplay.print("SET DIR", LEFT, 210);
utftDisplay.print("INFLIGHT", LEFT, 230);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 0);
utftDisplay.print("O", 95, 115);
utftDisplay.setColor(255, 255, 255);
utftDisplay.print("VU3ESV : VU2JLH",LEFT, 290);
// Initialize I2C communications
Wire.begin();
//Put the HMC5883 IC into the correct operating mode
Wire.beginTransmission(address); //open communication with HMC5883
Wire.write(0x02); //select mode register
Wire.write(0x00); //continuous measurement mode
Wire.endTransmission();
delay(300);
last_dx = centreX;
last_dy = centreY;
DegreeInput = ReadEEPROMValue(EEPROMSetpointLocation);
Inflight = ReadEEPROMValue(EEPROMInflightLocation);
if(Inflight<fixedInflight)
{
Inflight = fixedInflight;
}
storedModeValue = ReadEEPROMValue(EEPROM_ModeStatus_Location);
scaleMax = ReadEEPROMValue(EEPROM_ScaleMax_Location);
if (storedModeValue ==0)
{
modeValue = false; //Manual Mode
}
else if (storedModeValue == 1)
{
modeValue = true; // AutoMode
}
keypad.setDebounceTime(50);
keypad.setHoldTime(3000);
keypad.addEventListener(KeypadEventHandler); // Add an event listener for this keypad
pinMode(ManualSpeedControl, OUTPUT);
pinMode(CWMotor,OUTPUT);
digitalWrite(CWMotor,LOW);
pinMode(CCWMotor,OUTPUT);
digitalWrite(CCWMotor,LOW);
pinMode(Manual_Auto_Mode,INPUT);
pinMode(Stop_ResumeSignal,INPUT);
analogReference(DEFAULT);
}
double ReadAngleFromAccelerometer(int x_Offset, int y_Offset)
{
//Tell the HMC5883 where to begin reading data
Wire.beginTransmission(address);
Wire.write(0x03); //select register 3, X MSB register
Wire.endTransmission();
//Read data from each axis, 2 registers per axis
Wire.requestFrom(address, 6);
int x,y,z; //triple axis data
if(6<=Wire.available())
{
x = Wire.read() << 8 | Wire.read();
z = Wire.read() << 8 | Wire.read();
y = Wire.read() << 8 | Wire.read();
}
DrawRotatorPosition();
return atan2((double)y + y_Offset,(double)x + x_Offset)* (180 / 3.141592654) + 180;
}
void loop()
{
char key = keypad.getKey();
angle = ReadAngleFromAccelerometer(y_Offset, x_Offset);
if((digitalRead( Stop_ResumeSignal) == false)&& stopFlag == true)
{
stopFlag = false;
}
else if((digitalRead( Stop_ResumeSignal) == false)&& stopFlag == false)
{
stopFlag = true;
}
if (stopFlag == true)
{
digitalWrite(CWMotor,LOW);
digitalWrite(CCWMotor,LOW);
stopFlag = true;
utftDisplay.setColor(0, 0, 0);
utftDisplay.print(" ", RIGHT, 25);
}
else
{
if(((long)angle< DegreeInput )&& stopFlag == false)
{
digitalWrite(CWMotor,HIGH);
digitalWrite(CCWMotor,LOW);
utftDisplay.setColor(0, 255, 255);
utftDisplay.print(" CW ", RIGHT, 25);
}
if(((long)angle >DegreeInput)&& stopFlag == false)
{
digitalWrite(CWMotor,LOW);
digitalWrite(CCWMotor,HIGH);
utftDisplay.setColor(0, 255, 255);
utftDisplay.print(" CCW ", RIGHT, 25);
}
if(((long) angle == DegreeInput)||
((long) angle > DegreeInput-Inflight)&&
((long) angle < DegreeInput+ Inflight ))
{
digitalWrite(CWMotor,LOW);
digitalWrite(CCWMotor,LOW);
stopFlag = true;
utftDisplay.setColor(0, 0, 0);
utftDisplay.print(" ", RIGHT, 25);
}
}
if((digitalRead( Manual_Auto_Mode) == false) && modeValue == false )
{
modeValue = true;
SaveEEPROMValue(EEPROM_ModeStatus_Location, 1);
}
else if((digitalRead( Manual_Auto_Mode) == false) && modeValue == true )
{
modeValue = false;
SaveEEPROMValue(EEPROM_ModeStatus_Location, 0);
}
if (modeValue == false)
{
if(stopFlag == false)
{
int spdValue = analogRead(A0);
spdValue = map(spdValue, 0, 1023, 0 , 255);
analogWrite(ManualSpeedControl, spdValue);
}
else
{
analogWrite(ManualSpeedControl, 0);
}
utftDisplay.setColor(0, 255, 255);
utftDisplay.print("Manual ", RIGHT, 295);
}
else
{
if(stopFlag == false)
{
int rotationValue =abs( (int)(DegreeInput- (long) angle)); /* Irrespective of the Direction the difference in value needs to be considered for PWM
// , Stoping is based on Cw/CCW outputs*/
//Use Serial Print to check the value of rotationValue variable
int scaleRotationValue = rotationValue *4;
int scaleMaxValue = scaleMax *4;
int newSpeedValue = map(scaleRotationValue,0,scaleMaxValue, 0,255); //The Scaling needs to be fine tuned based on the Test.
analogWrite(ManualSpeedControl, newSpeedValue);
}
else
{
analogWrite(ManualSpeedControl, 0);
}
utftDisplay.setColor(0, 255, 255);
utftDisplay.print(" Auto ", RIGHT, 295);
}
dx = (diameter * cos((angle-90)*3.14/180)) + centreX; // calculate X position
dy = (diameter * sin((angle-90)*3.14/180)) + centreY; // calculate Y position
utftDisplay.setColor(BLACK);
DrawArrow(last_dx,last_dy, centreX, centreY, 8, 8); // Erase last arrow
utftDisplay.setColor(GREEN);
DrawArrow(dx,dy, centreX, centreY, 8, 8); // Draw arrow in new position
last_dx = dx;
last_dy = dy;
delay(25);
utftDisplay.setFont(SevenSegmentFull);
utftDisplay.setColor(255, 0, 127);
int a =(int)angle;
sprintf(formattedDataBuffer, FormatData("%03d"),a);
utftDisplay.print(formattedDataBuffer, LEFT, 135);
if(UserEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
utftDisplay.printNumI(DegreeInput,80,205);
}
if(InflightEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
utftDisplay.printNumI(Inflight,80,225);
}
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 100, 255);
if((angle < 22.5) || (angle > 337.5 ))utftDisplay.print(" North", LEFT, 260);
if((angle > 22.5) && (angle < 67.5 )) utftDisplay.print("North-East", LEFT, 260);
if((angle > 67.5) && (angle < 112.5 ))utftDisplay.print(" East", LEFT, 260);
if((angle > 112.5) && (angle < 157.5 ))utftDisplay.print("South-East", LEFT, 260);
if((angle > 157.5) && (angle < 202.5 ))utftDisplay.print(" South", LEFT, 260);
if((angle > 202.5) && (angle < 247.5 ))utftDisplay.print("South-West", LEFT, 260);
if((angle > 247.5) && (angle < 292.5 ))utftDisplay.print(" West", LEFT, 260);
if((angle > 292.5) && (angle < 337.5 ))utftDisplay.print("North-West", LEFT, 260);
}
void KeypadEventHandler(KeypadEvent key)
{
if (key != NO_KEY)
{
switch (keypad.getState())
{
case IDLE:
case RELEASED:
break;
case HOLD:
switch (key)
{
case '*':
if (inputSelection == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
utftDisplay.print(" ",80,225);
ResetInputBuffer();
UserEntry = 0;
InflightEntryStarted = true;
InflightEntryFinished = false;
}
break;
}
break;
case PRESSED:
switch (key)
{
case '#':
if (inputSelection == false)
{
UserEntryFinished = true;
UserEntryStarted = false;
if((UserEntry < 360) )
{
//If the User SetPoint is less than Inflight then we can't accept the set point
if(UserEntry> Inflight)
{
DegreeInput = UserEntry;
SaveEEPROMValue(EEPROMSetpointLocation, DegreeInput);
scaleMax = abs( (int)(DegreeInput- (long) angle));
SaveEEPROMValue (EEPROM_ScaleMax_Location, scaleMax);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",80,205);
stopFlag = false;
}
else
{
//Show Error in UI
}
}
else
{
utftDisplay.print(" ",80,205);
DegreeInput = ReadEEPROMValue(EEPROMSetpointLocation);
}
inputSelection = true;
}
else
{
InflightEntryFinished = true;
InflightEntryStarted = false;
if((UserEntry < maxInflight) )
{
Inflight = UserEntry;
SaveEEPROMValue(EEPROMInflightLocation, Inflight);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",80,225);
stopFlag = false;
}
else
{
utftDisplay.print(" ",80,225);
Inflight = ReadEEPROMValue(EEPROMInflightLocation);
}
inputSelection = false;
}
break;
case '*':
if (inputSelection ==false)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
utftDisplay.print(" ",80,205);
ResetInputBuffer();
UserEntry = 0;
UserEntryStarted = true;
UserEntryFinished = false;
}
break;
case '0':
case '1':
case '2':
case '3':
case '4':
case '5':
case '6':
case '7':
case '8':
case '9':
if (bufPtr < maxDegreeDigits)
{
KeyEntries[bufPtr] = key;
bufPtr++;
UserEntry = atol (KeyEntries);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
if (UserEntryStarted == true)
{
utftDisplay.printNumI(UserEntry,80,205);
}
if (InflightEntryStarted == true)
{
utftDisplay.printNumI(UserEntry,80,225);
}
}
break;
}
break;
}
}
}
void DisplayUserEntry(int x, int y, String userData)
{
utftDisplay.setColor(RED);
utftDisplay.setFont(BigFont);
utftDisplay.print(userData,x,y);
}
void DrawArrow(int x2, int y2, int x1, int y1, int arrowLength, int arrowWidth)
{
float distance;
int dx, dy, x2Outer,y2Outer,x3,y3,x4,y4,k;
distance = sqrt(pow((x1 - x2), 2) + pow((y1 - y2), 2));
dx = x2 + (x1 - x2) * arrowLength / distance;
dy = y2 + (y1 - y2) * arrowLength / distance;
k = arrowWidth / arrowLength;
x2Outer = x2 - dx;
y2Outer = dy - y2;
x3 = y2Outer * k + dx;
y3 = x2Outer * k + dy;
x4 = dx - y2Outer * k;
y4 = dy - x2Outer * k;
utftDisplay.drawLine(x1, y1, x2, y2);
utftDisplay.drawLine(x1, y1, dx, dy);
utftDisplay.drawLine(x3, y3, x4, y4);
utftDisplay.drawLine(x3, y3, x2, y2);
utftDisplay.drawLine(x2, y2, x4, y4);
}
void DrawRotatorPosition()
{
int dxOuter, dyOuter, dxi, dyi;
utftDisplay.setColor(255, 128, 0);
utftDisplay.drawCircle(centreX,centreY,diameter); // Draw compass circle
for (float i = 0; i <360; i = i + 22.5) {
utftDisplay.setColor(255, 128, 0);
dxOuter = diameter * cos((i-90)*3.14/180);
dyOuter = diameter * sin((i-90)*3.14/180);
dxi = dxOuter * 0.98;
dyi = dyOuter * 0.98;
utftDisplay.drawLine(dxi+centreX,dyi+centreY,dxOuter+centreX,dyOuter+centreY);
}
DisplayUserEntry((centreX-8),(centreY-157),"N");
DisplayUserEntry((centreX-8),(centreY+145),"S");
DisplayUserEntry((centreX+141),(centreY-7),"E");
DisplayUserEntry((centreX-160),(centreY-7),"W");
}
void ResetInputBuffer()
{
int length = sizeof(KeyEntries);
for (int i = 0; i < length; i++)
{
KeyEntries[i] = '\0';
}
bufPtr = 0;
}
//Reads and returns the stored value specified in the EEPROM Start Address
long ReadEEPROMValue(int16_t EEPROMStartAddress)
{
volatile EEPROMValue eepromVal;
eepromVal.Byte1 = EEPROM.read(EEPROMStartAddress);
eepromVal.Byte2 = EEPROM.read(EEPROMStartAddress+1);
eepromVal.Byte3 = EEPROM.read(EEPROMStartAddress+2);
eepromVal.Byte4 = EEPROM.read(EEPROMStartAddress+3);
return eepromVal.Value;
}
/*Stores the specified value in the EEPROM from Start Address
EEPROM Write will only happens when the stored value and new value are different.
This will save the number of Writes to the EEPROM.*/
void SaveEEPROMValue(int16_t EEPROMStartAddress, long Value)
{
volatile EEPROMValue eepromVal;
eepromVal.Value = ReadEEPROMValue(EEPROMStartAddress);
if(eepromVal.Value != Value)
{
eepromVal.Value = Value;
EEPROM.write(EEPROMStartAddress,eepromVal.Byte1);
EEPROM.write(EEPROMStartAddress+1,eepromVal.Byte2);
EEPROM.write(EEPROMStartAddress+2,eepromVal.Byte3);
EEPROM.write(EEPROMStartAddress+3,eepromVal.Byte4);
}
}
73, Máximo - EA1DDO
27
Analisis de Equipos comerciales / Re:Yaesu FT Dx-101D - Primer Yaesu SDR
« en: Mayo 23, 2018, 12:34:21 pm »
Una foto de la parte trasera del FT Dx-101D
[ You are not allowed to view attachments ]
[ You are not allowed to view attachments ]
28
Analisis de Equipos comerciales / Re:Yaesu FT Dx-101D - Primer Yaesu SDR
« en: Mayo 21, 2018, 06:11:14 pm »
Aunque no tiene nada que ver con el Yaesu, también tiene derecho a ser comentado ya que se presentó al mismo tiempo.
El Nuevo Kenwood TS-890S

Parece un TS-990S que le han sacado uno de los receptores, por lo que ha quedado más pequeño, algo similar el FT Dx-101D.
Lo que ocurre es que Kenwood aún no se ha puesto con el SDR, y este TS-890S sigue siendo analógico, como su hermano mayor TS-990S.
Para ser honestos, el aspecto de éste TS-890S es muy logrado. Ofrece seriedad y elegancia.
73, Máximo - EA1DDO
El Nuevo Kenwood TS-890S
Parece un TS-990S que le han sacado uno de los receptores, por lo que ha quedado más pequeño, algo similar el FT Dx-101D.
Lo que ocurre es que Kenwood aún no se ha puesto con el SDR, y este TS-890S sigue siendo analógico, como su hermano mayor TS-990S.
Para ser honestos, el aspecto de éste TS-890S es muy logrado. Ofrece seriedad y elegancia.
73, Máximo - EA1DDO
29
Analisis de Equipos comerciales / Yaesu FT Dx-101D - Primer Yaesu SDR
« en: Mayo 21, 2018, 05:42:28 pm »
Hola,
Pues tras muchos años de retraso (comparando con Flex, HPSDR, Icom, etc), por fin Yaesu acaba de presentar en Dayton su primera radio SDR, el FT Dx-101D.

De momento se sabe muy poco de ella, incluso en Dayton solo se podía ver, no tocar, ya que estaba dentro de una protección transparente.
[ You are not allowed to view attachments ]
A todo lo que ahí dice, se puede añadir que la versión europea llevará la banda de 4m (70 MHz).
Otros datos;
Medidas 420×130×320mm
Peso 12kg
Fecha estima de venta: Octubre 2018
Pues tras muchos años de retraso (comparando con Flex, HPSDR, Icom, etc), por fin Yaesu acaba de presentar en Dayton su primera radio SDR, el FT Dx-101D.
De momento se sabe muy poco de ella, incluso en Dayton solo se podía ver, no tocar, ya que estaba dentro de una protección transparente.
[ You are not allowed to view attachments ]
A todo lo que ahí dice, se puede añadir que la versión europea llevará la banda de 4m (70 MHz).
Otros datos;
Medidas 420×130×320mm
Peso 12kg
Fecha estima de venta: Octubre 2018
30
Todo sobre Antenas / Re:Receptor ADS-B en Modo S - FlightRadar24 - SkySense PlaneSight
« en: Abril 21, 2018, 12:13:50 pm »
Hola Borja,
Ese es interesante también y tiene buen precio.
Hay otro similar, a mitad de precio, aunque no es tan estrecho:
http://shop.sysmocom.de/products/cf1090-kt30-wideband
Habrá que pensarlo.
Gracias
73, Máximo
Ese es interesante también y tiene buen precio.
Hay otro similar, a mitad de precio, aunque no es tan estrecho:
http://shop.sysmocom.de/products/cf1090-kt30-wideband
Habrá que pensarlo.
Gracias
73, Máximo